About Me
Michael Zucchi
B.E. (Comp. Sys. Eng.)
also known as Zed
to his mates & enemies!
< notzed at gmail >
< fosstodon.org/@notzed >

Another rotation and scale invariant feature descriptor?
Just had an idea whilst waking up this morning so I punched out a quick couple hundred lines of code before lunch.
I guess it works?
This is just the first output, without any tuning or much mucking about.
It uses LOG to determine the scale-invariant feature locations and guassian edge detectors to determine the rotation invariance. A local binary pattern is used for the feature descriptor.
Not sure if someone else has taken the same approach (the scale/rotation variance is a standard technique), possibly worth writing this one up if not.
Worth a beer at any rate. Cheers big ears.
A weak face detector?
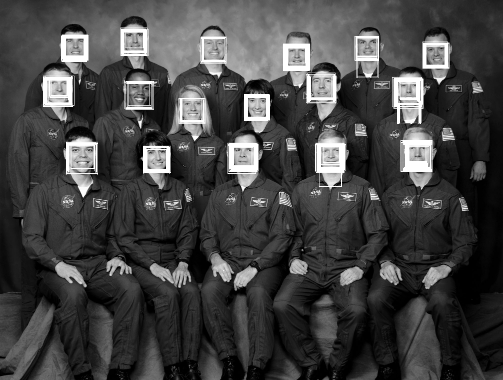
First, here is the raw output from one of the haar cascades included in OpenCV (frontalface-alt) using the Viola & Jones object detection algorithm. This is a 20x20 face detector which requires 2135 feature tests via 4630 individual rectangles and approximately 200KB of constant data storage at runtime assuming optimal data packing.
It is being executed over a good number of steps over range of scales and tested at every pixel location of the given scale.
To be usable as a robust face detector further post-processing on the raw hit rectangles must be performed and then further work is needed to weed out false positives such as the NASA logo or hands which would still pass this process. Together with a wise choice of search scale.
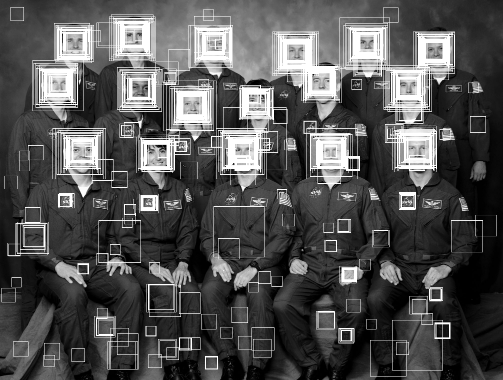
The following is the raw output from a short training run of the fodolc algorithm over the same scale range. This is a 20x20 face detector which requires exactly 400 tests of a 4 bit local binary pattern (LBP) encoded image and 800 bytes of data storage at runtime. This is using a loose threshold to give comparable results to the haar cascade and to see what sort of features give false positives.
Unlike the haar cascade the output is simply a distance. This can simplify the post-processing to a threshold and basic non-minimal suppression trough detection.
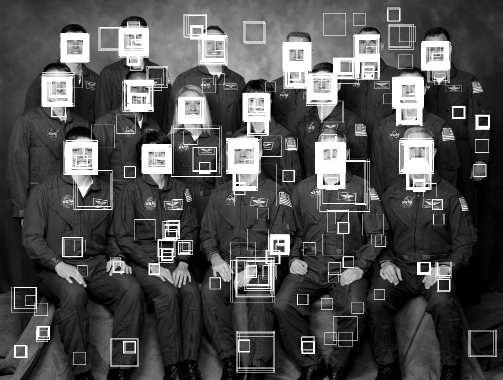
As an example the following the raw output from the same fodolc detector but with a tighter threshold.
There are still some false positives but obviously it is something of an improvement - trivial trough detection would clean it up to a point exceeding the result of the haar cascade.
This is only a weak classifier taken from just the first 15 minutes or so of classifier training on 10 000 training images extracted or synthesised solely from 880 portrait photographs. Longer training always generates a better detector. A higher quality training set should generate a better detector. Training is by a very basic genetic algorithm.
In Java on a beefy workstation the execution time is roughly the same between the two algorithms but the fodolc algorithm can be implemented in efficient SIMD or OpenCL/GPU with very little effort for significant (order of magnitude) gains.
The following is the entire code of the classifier outside of the LBP conversion and of course the classifier table itself.
// Can you copyright something so simple??
public class Classify {
private final static short[] face = { ... };
public int score(byte[] lbp, int stride, int xi, int yi) {
int score = 0;
for (int y=0,i=0;y<20;y++)
for (int x=0;x<20;x++,i++)
score += (face[i] >>> lbp[x+xi+(y+yi)*stride]) & 1;
return score;
}
}
Fast Face Detection in One Line of Code has a link to an unpublished paper with brief overview of the algorithm and local binary pattern used.
Please comment on this post if you think this is interesting. Or even if you're just as dumbfounded as I am that something so simple could possibly work.
The face detector was trained using images from the FERET database of facial images collected under the FERET program, sponsored by the DOD Counterdrug Technology Development Program Office (USA).
http://www.zedzone.au/blog/2014/08/a-weak-face-detector.html
epiphany gpu and bits
Work was a bit too interesting this week to fit much else into my head so I didn't get much time to play with the softgpu until today.
This morning i spent a few hours just filling out a basic GLES2 style frontend (it is not going to ever be real GLES2 because of the shader compiler thing).
I had most of it for the Java SoftGPU code but I wanted to make some improvements and the translation to C always involves a bit of piss farting about fixing compile errors and runtime bugs. Each little bit isn't terribly big but it adds up to quite a collection of code and faffing about - i've got roughly 4KLOC of C and headers just to get to this point and double that in Java that I used to prototype a few times.
But as of an hour or two ago I have just enough to be able to take this code:
int main(int argc, char **argv) {
int res;
struct matrix4 m1, m2;
res = fb_open("/dev/fb0");
if (res == -1) {
perror("Unable to open fb");
return 1;
}
pglInit();
pglSetTarget(fb_getFrameBuffer(), fb_getWidth(), fb_getHeight());
glViewport(0, 0, 512, 512);
glEnableVertexAttribArray(0);
glEnableVertexAttribArray(1);
glVertexAttribPointer(0, 4, GL_FLOAT, GL_TRUE, 0, star_vertices);
glVertexAttribPointer(1, 3, GL_FLOAT, GL_TRUE, 0, star_colours);
matrix4_setFrustum(&m1, -1, 1, -1, 1, 1, 20);
matrix4_setIdentity(&m2);
matrix4_rotate(&m2, 45, 0, 0, 1);
matrix4_rotate(&m2, 45, 1, 0, 0);
matrix4_translate(&m2, 0, 0, -5);
matrix4_multBy(&m1, &m2);
glUniformMatrix4fv(0, 1, 0, m1.M);
glDrawElements(GL_TRIANGLES, 3*8, GL_UNSIGNED_BYTE, star_indices);
glFinish();
fb_close();
return 0;
}
And turn it into this:
The vertex shader will run on-host and the code for the one above is:
static void vertexShaderRGB(float *attrib[], float *var, int varStride, int count, const float *uniforms) {
float *pos = attrib[0];
float *col = attrib[1];
for (int i=0;i<count;i++) {
matrix4_transform4(&uniforms[0], pos, var);
var[4] = col[0];
var[5] = col[1];
var[6] = col[2];
var += varStride;
pos += 4;
col += 3;
}
}
I'm passing the vertex arrays as individual elements in the attrib[] array: i.e. array[0] is vertex array 0 and the size matches that set by the client code. For output, var[0] to var[3] is equivalent of "glPosition" and the rest are "user set" varyings. The vertex arrays are being converted to float1/float2/float3/float4 before it being called (actually only GL_FLOAT is implemented anyway) so they are not just the raw arrays.
I'm doing it this way at present as it allows the draw commands to iterate through the arrays in the presumably long dimension of the number of elements rather than packing across the active arrays. It can also allow for NEON-efficient shaders if the data is set-up in a typical way (i.e. float4 data) and because all vertices are processed in a batch.
For glDrawElements() I implemented the obvious optimisation in that it only processes the vertices indexed by the indices array and only once per unique vertex. The processed vertices are then expanded out using the indices before being passed to the primitive assembler. So for the triangular pyramid i'm using 8 input vertices to generate 24 triangle vertices via the indices which are then passed to the primitive assembler. Even a very simple new-happy prototype of this code in my Java SoftGPU led to a 10% performance boost of the blocks-snake demo.
But I got to the point of outputting a triangle with perspective and thought i'd blog about it. Even though it isn't very much work I haven't hooked up the epiphany backend yet, i'm just a bit too bloody tired and hungry right now. For some reason spring means i'm waking up way too early, not sure why i'm so hungry after a big breakfast, and the next bit has been keeping my head busy all week ...
fodolc
I've been playing quite a bit with my object detector algorithm and I came up with a better genetic algorithm for training it - and it's really working quite well. Mostly because the previous algorithm just wasn't very good and tended to get stuck in a monoculture due to the way it pooled the total population rather than separating the generations. In some cases I'm getting better accuracy and similar robustness as the viola & jones ('haarcascade') detectors, although i haven't tested it widely..
In particular I have a 24x16 object detector which requires only 768 bytes of classifier data (total) and a couple of lines of code to evaluate (sans the local binary pattern setup which isn't much more). It can be trained in a few hours (or much faster with OpenCL/GPU) and whilst not as robust as little as 100 positive images are enough to get a usable result. The equivalent detectors in OpenCV need 300K-400K of tables - at the very least - and that's after a lot of work on packing them down. I'm not employing boosting or validation set feedback yet - mostly because I don't understand it/can't get it to work - so maybe it can be improved.
Unlike other algorithms i'm aware of every stage is parallel-efficient to the instruction level and I have a NEON implementation that classifies more than one pixel per clock cycle. I may port it to parallella, I think across the 16 cores I can beat the per-clock performance of NEON but due to it's simplicity bandwidth will be the limiting factor there (again). At least the classifier data and code can fit entirely on-core and leave a relative-ton of space for image cache. It could probably fit into the FPGA for that matter. I might not either, because I have enough to keep me busy and other unspecified reasons.
asm vs c II
I dunno, i'm almost lost for words on this one.
typedef float float4 __attribute__((vector_size(16))) __attribute__((aligned(16)));
void mult4(float *mat, float4 * src, float4 * dst) {
dst[0] = src[0] + mat[0];
}
notzed@minized:src$ make simd.o
arm-linux-gnueabihf-gcc -c -o simd.o simd.c -O3 -mcpu=cortex-a9 -marm -mfpu=neon
notzed@minized:$ arm-linux-gnueabihf-objdump -dr simd.o
simd.o: file format elf32-littlearm
Disassembly of section .text:
00000000 :
0: f4610aef vld1.64 {d16-d17}, [r1 :128]
4: ee103b90 vmov.32 r3, d16[0]
8: edd07a00 vldr s15, [r0]
c: e24dd010 sub sp, sp, #16
10: ee063a10 vmov s12, r3
14: ee303b90 vmov.32 r3, d16[1]
18: ee063a90 vmov s13, r3
1c: ee113b90 vmov.32 r3, d17[0]
20: ee366a27 vadd.f32 s12, s12, s15
24: ee073a10 vmov s14, r3
28: ee313b90 vmov.32 r3, d17[1]
2c: ee766aa7 vadd.f32 s13, s13, s15
30: ee053a90 vmov s11, r3
34: ee377a27 vadd.f32 s14, s14, s15
38: ee757aa7 vadd.f32 s15, s11, s15
3c: ed8d6a00 vstr s12, [sp]
40: edcd6a01 vstr s13, [sp, #4]
44: ed8d7a02 vstr s14, [sp, #8]
48: edcd7a03 vstr s15, [sp, #12]
4c: f46d0adf vld1.64 {d16-d17}, [sp :64]
50: f4420aef vst1.64 {d16-d17}, [r2 :128]
54: e28dd010 add sp, sp, #16
58: e12fff1e bx lr
notzed@minized:/export/notzed/src/raster/gl/src$
I thought that the store/load/store via the stack was a particularly cute bit of work, especially given the results were already in the right order and in adequately aligned registers. r3 also seems a little too popular.
I guess the vector extensions to gcc just aren't finished - or just don't work. Maybe I used the wrong flags or my build is broken. It produces similar junk code for the epiphany mind you. I've never really tried using them but after a bunch of OpenCL in the past I thought it might be worth a shot to access SIMD without machine code.
My NEON is very rusty but I think it could be something like this:
notzed@minized:src$ arm-linux-gnueabihf-objdump -dr neon-mat4.o
neon-mat4.o: file format elf32-littlearm
Disassembly of section .text:
00000000 :
0: f4a02caf vld1.32 {d2[]-d3[]}, [r0]
4: f4210a8f vld1.32 {d0-d1}, [r1]
8: f2000d42 vadd.f32 q0, q0, q1
c: f4020a8f vst1.32 {d0-d1}, [r2]
10: e12fff1e bx lr
As can be seen from the names I started with a "simple" matrix multiply but whittled it down to something I thought the compiler could manage after seeing what it did to it - this is just a meaningless snippet.
After a pretty long day at work I was just half-heartedly poking at filling out the frontend to the epiphany gpu but just got distracted by whining at the compiler again. I should've just started with NEON, after a little poking I remembered how nice it was.
And I thought I hated tooltips ...
Found on some m$ site whilst looking for how to turn off tooltips:
I've spent over 10 hours the last two days trying to solve the same problem. Apparently it is impossible to get rid of tooltips in Win7, which makes it absolutely unusable for me. I've wasted my time. I've wasted my money. Just installed Ubuntu which doesn't cost a penny and with one checkmark I get to disable all tooltips. With Microsoft I get to pay $100 for something that seems intentionally designed for maximum annoyance. Goodbye Microsoft. Last dime you ever got from me.
Had a laugh then thought fucking around in regedit wasn't worth it and so left it at that.
But yeah tooltips suck shit. If your GUI needs tooltips to be usable, it just needs bloody fixing. Icons just don't work when you've got more than a dozen or so choices (not much does for a human).
first triangle from epiphany soft-gpu
I was nearly going to leave it for the weekend but after Andreas twattered about the last post I figured i'd fill in the last little bit of work to get it running on-screen. It was a bit less work than I thought.
- One epiphany core is a bit faster than one Zynq ARM core! 15s vs 18s (but a small amount of neon and a slightly different inner loop would make a huge difference);
- Scaling is ok but not great at the high end, 4 cores = 5.5s, 8 cores = 4.6s, 16 cores = 3.9s;
- The output dma isn't interlocked so it's losing about 1/2 the write performance once more than one core is active;
- All memory and jobs are synchronous (
ezesdk's async dma routines aren't working for some reason luser error on that one);
- Scheduling is static, each core does interleaved rows;
- Over half of the total processing time for rendering this single triangle is spent on the float4 to uint32 rgba clamping and conversion and it can't be sped up. This cost is fixed per frame, but who would have thought the humble clamp() could be the main bottleneck?
- Total on-core .text is under 2K (could easily increase the render size to 768 pixels wide?);
- It's all just C but I don't think significant gains are possible in assembly.
The times are for rotating the triangle around the centre of the screen for 360 degrees, one degree per frame. The active playfield is 512x512 pixels. Z buffer testing is on.
Actually the first triangle was a bit too boring, so it's a few hundred triangles later.
Update: I was just about to call it a night and I spotted a bit of testing code left in: it was always processing 1280 pixels for each triangle rather than the bounding-box. So the times are somewhat out and it's more like arm(-O2)=15.5s, epu 1x=11.5s 4x=3.9s 8x=3.1s 16x=2.4s. I also did some double-buffering and so on but before I spotted this bug but the timing is so shot it turned out to be pointless.
I did confirm that loading the primitive data is a major bottleneck however. But as a baseline the performance is a lot more interesting than it was a few hours ago.
epiphany soft-gpu thoughts
I've been feeling a bit off of late so not hacking much of an evening but I did get a spare couple to poke at the soft-gpu and finally write some epiphany code.
Of course I got completely side-tracked on the optimisation side of things so I didn't get terribly far. But I solidified the plan-of-attack and sorted out some way to provide C based shader code in a way which will still get some performance. I have much of the interesting setup code done as well (although there is more uninteresting stuff, maybe I will just use java as the driver).
I've re-settled on the earlier idea of separating the rasterisation from the fragment shading but it will all run on the same core. There will be 3 loops.
- Rasteriser which performs in-triangle and Z/W buffer tests and generates the X coordinate and interpolated 1/W value for all to-be-rendered fragments;
- Reciprocaliser[sic] which inverts all the 1/W values in a batch;
- Fragment processor which interpolates all of the varying values and invokes the fragment shader.
This allows each loop to be optimised separately and reduces register pressure. Due to the visual similarity of some of the setup I thought there would be some duplicated calculations but there actually isn't since each is working with different values.
1 and 2 will be hard-coded as part of the platform but 3 will be compiled separately for each shader so that the shader can be compiled in-line. This is the only way to get any performance out of the C code.
The shaders will be compiled something like this:
/*
* Shader fragment to call
*/
#define SHADER_INVOKE(colour) solid_gourad(colour, uniform, var0, var1, var2)
/*
* An example shader - solid (interpolated) colour
*/
static inline void solid_gourad(float *colour, float *uniform, float var0, float var1, float var2) {
colour[0] = var0;
colour[1] = var1;
colour[2] = var2;
colour[3] = 1.0f;
}
/*
* Include the actual routine to use
*/
#include "e-fragment-processor.h"
And e-fragment-processor will have a generic inner loop which will be something like:
void draw_row(... arguments) {
... setup
const float var0x = v[VS_X+0];
const float var1x = v[VS_X+1];
const float var2x = v[VS_X+2];
// Set start location for interpolants
float var0_w = (var0x * fx + v[0 + VS_Y] * fy + v[0 + VS_Z]);
float var1_w = (var1x * fx + v[1 + VS_Y] * fy + v[1 + VS_Z]);
float var2_w = (var2x * fx + v[2 + VS_Y] * fy + v[2 + VS_Z]);
// ... up to whatever limit I have, 16 is probably practical
for (int i=0;i<count;i++) {
struct fragment f = fragments[i];
// divide by w to get interpolated value
float var0 = (var0_w + f.x * var0x) * f.w;
float var1 = (var1_w + f.x * var1x) * f.w;
float var2 = (var2_w + f.x * var2x) * f.w;
// .. etc
// shader says how many varX's it uses so compiler automatically
// removes any redundant calculations: so only one version of this file
// need be created
SHADER_INVOKE(colour + f.x * 4);
}
}
Written this way a simple colour gourad shader is around 500 bytes or so and the inner loop is 20 instructions although not very well scheduled.
The end goal would be to have multiple shaders loaded dynamically at runtime but that sounds like too much work so i'll keep it simple and just link them in.
It's a trade-off between ease of use and performance although from some preliminary benchmarking (well, looking at what the compiler produces) I think this is about as good as the compiler is going to get. Being able to provide a programmable shader at near-optimal performance would be a nice bullet-point.
An alternative is that the shader must just implement draw_row() and the code template above is copied; this might be useful if some other hard-to-calculate value like the reciprocal is required per-pixel and it can separate that pass into a separate loop.
Memory
On memory i've decided to set the rendering size to 512 pixels. I was hoping for 1024 but that's just a bit too big to fit and a bit too much work for the memory bus besides.
- 8192 float Colour buffer - 4x4x512
- 2048 Z/W buffer - 4x512
- 2048 1/W work - 4x512 (could be done in batches)
- 2048 X work - 5x512 (could be done in batches, or use int16)
- 2048 Frame buffer colour transfer 4x512
- 1024 Primitive transfer buffers (at least 2).
That leaves 7K 15K (oops, out by 8k) for code and stack and some other control structures - which should be enough to do some interesting things. I decided the data needs to be transferred using DMA because the final pass only needs to scale and clamp the floating point framebuffer data to bytes: this is not enough work to prevent the output writes stalling the CPU. Having a separate buffer for the DMA allows the rest to run asynchronously. I will need to round-robin the DMA writes for greatest performance or run them via a central framebuffer controller (and/or dedicate a whole core to the job, in which case it would maintain the colour transfer buffers too).
Actually the above design does let me efficiently split the fragment shaders into separate cores too if I want because they only need to transfer (x,1/w) tuples for each fragment to render - this was my original idea. If I did that then I could probably fit a 1024-pixel row in memory too.
The bottlenecks?
The gpu will work most efficiently by processing every triangle in the scene in one pass: this allows the framebuffer to stay on-core (and in the native floating point format) which provides very high bandwidth and blending essentially free. One every primitive on that row has been rendered the local framebuffer row cache is converted to bytes and flushed out to the real framebuffer (multipass rendering would also require loading from the framebuffer first, but lets not get carried away here).
I'm intentionally not worrying about texture maps (as in, not implement anything for them). Yes they could be used but the performance hit is going to be so dire that it is not going to be desirable to use them. If they were to be used I think a separate texture fetch pass will be required before the fragment shader - so that can fire off some scatter-gather DMA and then process the results as they arrive. I think this is not going to be easy or efficient with the current DMA capabilities.
So, ... ignore that. I will need some useful noise functions so that interesting textures can be procedurally generated instead.
The epiphany to framebuffer speed is pretty low, but that's fixed: there's nothing I can do about that, so no use wasting time crying over spilt milk on that one.
So, ... ignore that too.
I think the main bottleneck will be the transfer of the primitives - because they will all have to be loaded for each row. I will add some input indexing mechanism to separate them into bands so the loading of out-of-range primitives is reduced but fully indexing every row would be costly. If I can work out how to get the broadcast DMA to work (if indeed, it does actually work) then that may help alleviate some of the bandwidth requirements although it comes at a cost of forcing all rasterisers to operate in lock-step across the same band of framebuffer - which might be worse.
I may be completely off on this though - I really gotta just code this up and see how it works.
Deferred Rendering
Actually just to get way ahead of myself here; another alternative is a type of deferred rendering. Rather than keep track of the colour buffer it could just keep of (triangle id, x, 1/w) for each visible pixel. Once it's finished it could then just process the visible pixels - at most once per pixel.
This could be implemented by splitting the triangle primitive into two parts - first the bounding box, edge and z/w and 1/w interpolation equations, and the second being the varying equations. Each pass only needs that set of data - so it could reduce bandwidth requirements too.
Blending is more difficult. With it on every visible triangle would need to be rendered immediately and any previously rendered triangles waiting in the deferred buffer would need to be flushed.
Something to defer till later I guess (ho ho).
Starting JavaFX from random Java code
I write a lot of prototype routines - too many to keep track of in separate projects so I end up with a ton of mains(). Best practice? Who gives a shit: its a prototype, played with for a day or a week and then forgotten.
So far for graphical output i've just been using Swing: actually there's probably not much reason not to use it for that because it does the job but once you need to add some interactivity it becomes a bit of a pain if you've been playing with JavaFX. I might add a 'display intermediate image' anywhere in the code and up it comes.
But JavaFX doesn't let you just call Platform.runLater() or new Stage() from anywhere as with Swing: the system needs initialising within an Application context.
Here's a solution. I have no claims it's a good one but it works for me so far.
// This code is placed in the public domain
public class FXUtils {
static FXApplication app;
static Semaphore sem = new Semaphore(0);
public static void startFX(Runnable r) {
if (app == null) {
try {
Thread t = new Thread(() -> {
FXApplication.start(r);
});
t.start();
sem.acquire();
} catch (InterruptedException ex) {
}
} else {
Platform.runLater(r);
}
}
public static class FXApplication extends Application {
WritableImage image;
static Runnable run;
public FXApplication() {
}
@Override
public void start(Stage stage) throws Exception {
app = this;
run.run();
sem.release();
}
public static void start(Runnable r) {
run = r;
// Application.launch() can only be called from a static
// method from a class that extends Application
Application.launch();
// no windows - no app!
System.exit(0);
}
}
}
Whether start() calls System.exit() or not is up to you - personally when I close a window i'm prototyping stuff on I want everything else to fuck off for good.
And this is how to use it:
public static void main(String[] args) {
FXApplication.start(() -> {
// Now on javafx thread
Stage s = new Stage();
s.setScene(new Scene(new VBox(new Label("foobar!"))));
s.show();
});
// Will wait for javafx to start, but then continue here
// exiting will leave the windows open, till they're closed
}
This uses a thread to launch javafx so that the original main thread can continue; Application.launch() doesn't return until the last window is closed so would otherwise block. The thread could be made a daemon too for some different behaviours.
If you just want to launch a full JavaFX application from multiple mains then none of this is required, just create a static start() method which calls Application.launch().
Copyright (C) 2019 Michael Zucchi, All Rights Reserved.
Powered by gcc & me!